簡而言之:
您可以通過施加pwm信號來線性控制'速度',現在該信號的頻率必須足夠高,以使您的直流電動機僅通過PWM信號的直流分量,這只是平均值。將電動機視為低通濾波器。如果您查看傳遞函數或角速度與電壓之間的關係,這就是您的經驗
$$ \ frac {\ omega(s)} {V(s)} = \ frac {K} {\ tau s + 1} $$
這是直流電動機的一階模型,或者只是截止頻率為$$ f_c = \ frac {1} {2 \ pi \ tau} $$
的低通濾波器
其中\ $ \ tau \ $是電動機的時間常數。因此,只要您的頻率超過截止頻率,您的電動機將僅看到DC部分或PWM信號的平均值,並且您的速度將與PWM佔空比一致。當然,如果您的頻率很高,則應該考慮一些折衷...
L長故事:
理論上,您需要知道電動機的時間常數,才能選擇“正確的” PWM頻率。您可能知道,電機達到最終值幾乎100%所需的時間為$$ t_ {final} \約5 \ tau $$
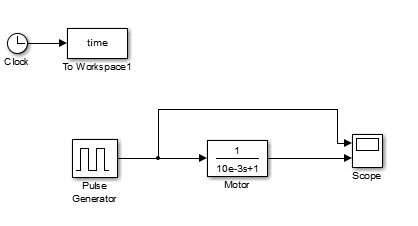
您的PWM頻率必須足夠高,以使電動機(本質上是低通濾波器)對您的輸入電壓(即方波)求平均。例如,假設您有一台時間常數為\ $ \ tau = 10ms \ $的電動機。我將使用一階模型來模擬其對多個PWM週期的響應。這是直流電動機型號:
$$ \ frac {\ omega(s)} {V(s)} = \ frac {K} {10 ^ {-3} s + 1} $$
為了簡單起見,我們讓\ $ k = 1 \ $。
但更重要的是,這裡是我們正在尋找的答案。對於第一個示例,PWM週期為\ $ 3 \ tau \ $,佔空比為50%。這是電機的響應:
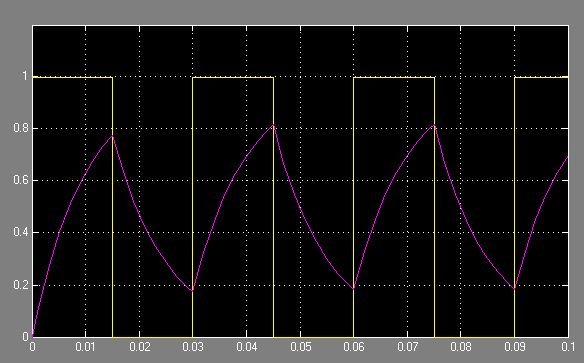
黃色圖是PWM信號(佔空比為50%,週期為\ $ 3 \ tau = 30ms \ $),紫色為電動機的速度。如您所見,由於PWM的頻率不夠高,電動機的速度會大幅波動。
現在讓我們增加PWM頻率。PWM週期現在為\ $ 0.1 \ tau = 1ms \ $,佔空比仍然為50%。
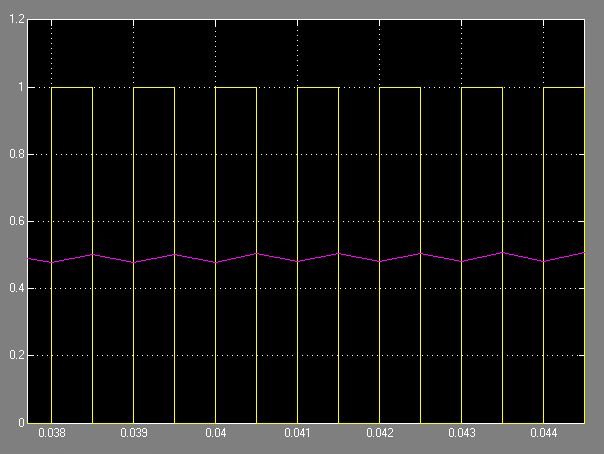
如您所見,由於pwm信號的高頻成分已被濾除,因此速度現在幾乎是恆定的。
總之,我選擇的頻率至少為\ $ f_s \ geq \ frac {5} {2 \ pi \ tau} \ $。
這只是有關如何選擇PWM頻率的非常理論性的解釋。希望對您有幫助!